Flink原理与实现:架构和拓扑概览
架构
要了解一个系统,一般都是从架构开始。我们关心的问题是:系统部署成功后各个节点都启动了哪些服务,各个服务之间又是怎么交互和协调的。下方是 Flink 集群启动后架构图。
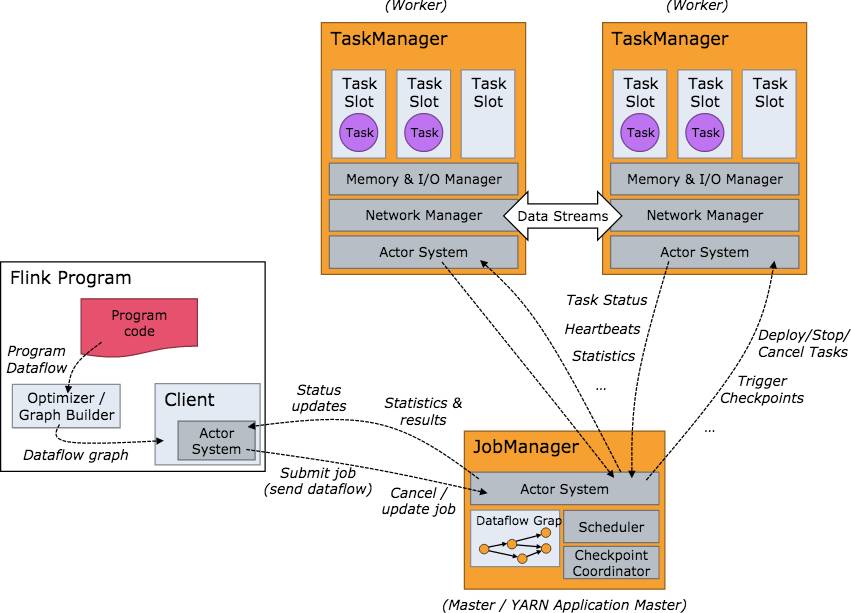
当 Flink 集群启动后,首先会启动一个 JobManger 和一个或多个的 TaskManager。由 Client 提交任务给 JobManager,JobManager 再调度任务到各个 TaskManager 去执行,然后 TaskManager 将心跳和统计信息汇报给 JobManager。TaskManager 之间以流的形式进行数据的传输。上述三者均为独立的 JVM 进程。
Client 为提交 Job 的客户端,可以是运行在任何机器上(与 JobManager 环境连通即可)。提交 Job 后,Client 可以结束进程(Streaming的任务),也可以不结束并等待结果返回。
JobManager 主要负责调度 Job 并协调 Task 做 checkpoint,职责上很像 Storm 的 Nimbus。从 Client 处接收到 Job 和 JAR 包等资源后,会生成优化后的执行计划,并以 Task 的单元调度到各个 TaskManager 去执行。
TaskManager 在启动的时候就设置好了槽位数(Slot),每个 slot 能启动一个 Task,Task 为线程。从 JobManager 处接收需要部署的 Task,部署启动后,与自己的上游建立 Netty 连接,接收数据并处理。
可以看到 Flink 的任务调度是多线程模型,并且不同Job/Task混合在一个 TaskManager 进程中。虽然这种方式可以有效提高 CPU 利用率,但是个人不太喜欢这种设计,因为不仅缺乏资源隔离机制,同时也不方便调试。类似 Storm 的进程模型,一个JVM 中只跑该 Job 的 Tasks 实际应用中更为合理。
Job 例子
本文所示例子为 flink-1.0.x 版本
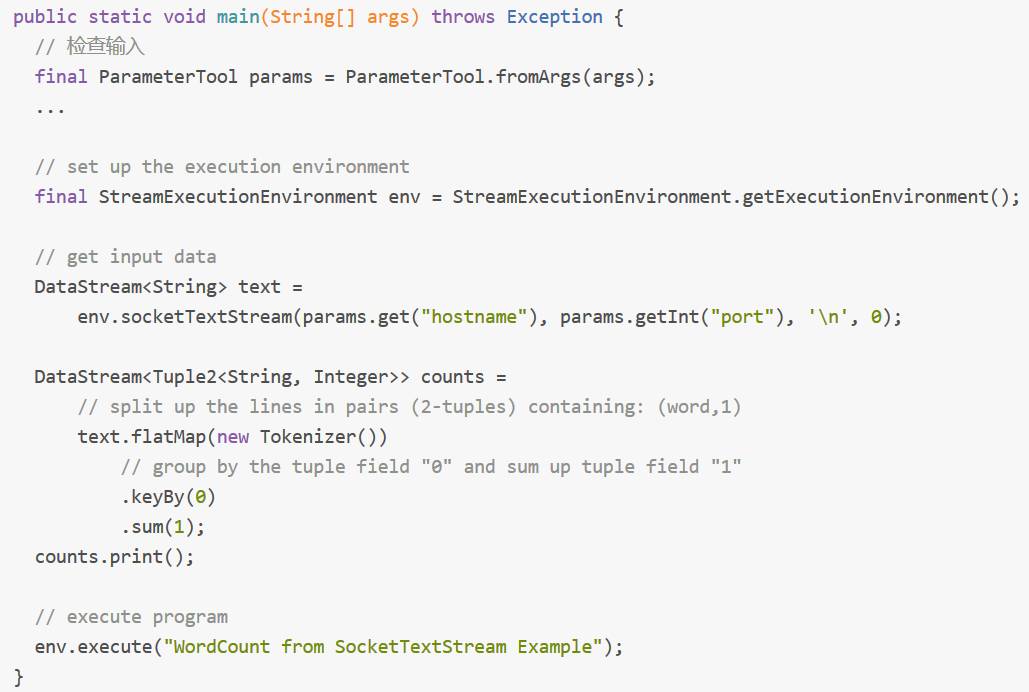
我们使用 Flink 自带的 examples 包中的 SocketTextStreamWordCount,这是一个从 socket 流中统计单词出现次数的例子。
首先,使用 netcat 启动本地服务器:

然后提交 Flink 程序

在netcat端输入单词并监控 taskmanager 的输出可以看到单词统计的结果。
SocketTextStreamWordCount 的具体代码如下:
我们将最后一行代码 env.execute 替换成 System.out.println(env.getExecutionPlan()); 并在本地运行该代码(并发度设为2),可以得到该拓扑的逻辑执行计划图的 JSON 串,将该 JSON 串粘贴到 http://flink.apache.org/visualizer/ 中,能可视化该执行图。

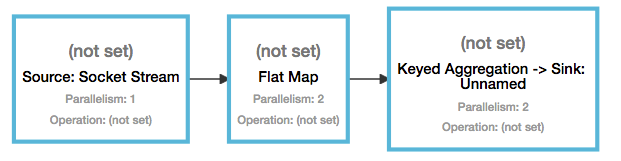
但这并不是最终在 Flink 中运行的执行图,只是一个表示拓扑节点关系的计划图,在 Flink 中对应了 SteramGraph。另外,提交拓扑后(并发度设为2)还能在 UI 中看到另一张执行计划图,如下所示,该图对应了 Flink 中的 JobGraph。
Graph
看起来有点乱,怎么有这么多不一样的图。实际上,还有更多的图。Flink 中的执行图可以分成四层:StreamGraph -> JobGraph -> ExecutionGraph -> 物理执行图。
StreamGraph:是根据用户通过 Stream API 编写的代码生成的最初的图。用来表示程序的拓扑结构。
JobGraph:StreamGraph经过优化后生成了 JobGraph,提交给 JobManager 的数据结构。主要的优化为,将多个符合条件的节点 chain 在一起作为一个节点,这样可以减少数据在节点之间流动所需要的序列化/反序列化/传输消耗。
ExecutionGraph:JobManager 根据 JobGraph 生成的分布式执行图,是调度层最核心的数据结构。
物理执行图:JobManager 根据 ExecutionGraph 对 Job 进行调度后,在各个TaskManager 上部署 Task 后形成的“图”,并不是一个具体的数据结构。
例如上文中的2个并发度(Source为1个并发度)的 SocketTextStreamWordCount 四层执行图的演变过程如下图所示(点击查看大图):
这里对一些名词进行简单的解释。
StreamGraph:根据用户通过 Stream API 编写的代码生成的最初的图。
StreamNode:用来代表 operator 的类,并具有所有相关的属性,如并发度、入边和出边等。
StreamEdge:表示连接两个StreamNode的边。
JobGraph:StreamGraph经过优化后生成了 JobGraph,提交给 JobManager 的数据结构。
JobVertex:经过优化后符合条件的多个StreamNode可能会chain在一起生成一个JobVertex,即一个JobVertex包含一个或多个operator,JobVertex的输入是JobEdge,输出是IntermediateDataSet。
IntermediateDataSet:表示JobVertex的输出,即经过operator处理产生的数据集。producer是JobVertex,consumer是JobEdge。
JobEdge:代表了job graph中的一条数据传输通道。source 是 IntermediateDataSet,target 是 JobVertex。即数据通过JobEdge由IntermediateDataSet传递给目标JobVertex。
ExecutionGraph:JobManager 根据 JobGraph 生成的分布式执行图,是调度层最核心的数据结构。
ExecutionJobVertex:和JobGraph中的JobVertex一一对应。每一个ExecutionJobVertex都有和并发度一样多的 ExecutionVertex。
ExecutionVertex:表示ExecutionJobVertex的其中一个并发子任务,输入是ExecutionEdge,输出是IntermediateResultPartition。
IntermediateResult:和JobGraph中的IntermediateDataSet一一对应。每一个IntermediateResult的IntermediateResultPartition个数等于该operator的并发度。
IntermediateResultPartition:表示ExecutionVertex的一个输出分区,producer是ExecutionVertex,consumer是若干个ExecutionEdge。
ExecutionEdge:表示ExecutionVertex的输入,source是IntermediateResultPartition,target是ExecutionVertex。source和target都只能是一个。
Execution:是执行一个 ExecutionVertex 的一次尝试。当发生故障或者数据需要重算的情况下 ExecutionVertex 可能会有多个 ExecutionAttemptID。一个 Execution 通过 ExecutionAttemptID 来唯一标识。JM和TM之间关于 task 的部署和 task status 的更新都是通过 ExecutionAttemptID 来确定消息接受者。
物理执行图:JobManager 根据 ExecutionGraph 对 Job 进行调度后,在各个TaskManager 上部署 Task 后形成的“图”,并不是一个具体的数据结构。
Task:Execution被调度后在分配的 TaskManager 中启动对应的 Task。Task 包裹了具有用户执行逻辑的 operator。
ResultPartition:代表由一个Task的生成的数据,和ExecutionGraph中的IntermediateResultPartition一一对应。
ResultSubpartition:是ResultPartition的一个子分区。每个ResultPartition包含多个ResultSubpartition,其数目要由下游消费 Task 数和 DistributionPattern 来决定。
InputGate:代表Task的输入封装,和JobGraph中JobEdge一一对应。每个InputGate消费了一个或多个的ResultPartition。
InputChannel:每个InputGate会包含一个以上的InputChannel,和ExecutionGraph中的ExecutionEdge一一对应,也和ResultSubpartition一对一地相连,即一个InputChannel接收一个ResultSubpartition的输出。
那么 Flink 为什么要设计这4张图呢,其目的是什么呢?Spark 中也有多张图,数据依赖图以及物理执行的DAG。其目的都是一样的,就是解耦,每张图各司其职,每张图对应了 Job 不同的阶段,更方便做该阶段的事情。我们给出更完整的 Flink Graph 的层次图。
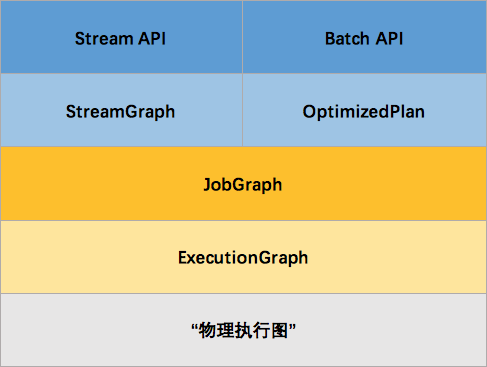
首先我们看到,JobGraph 之上除了 StreamGraph 还有 OptimizedPlan。OptimizedPlan 是由 Batch API 转换而来的。StreamGraph 是由 Stream API 转换而来的。为什么 API 不直接转换成 JobGraph?因为,Batch 和 Stream 的图结构和优化方法有很大的区别,比如 Batch 有很多执行前的预分析用来优化图的执行,而这种优化并不普适于 Stream,所以通过 OptimizedPlan 来做 Batch 的优化会更方便和清晰,也不会影响 Stream。JobGraph 的责任就是统一 Batch 和 Stream 的图,用来描述清楚一个拓扑图的结构,并且做了 chaining 的优化,chaining 是普适于 Batch 和 Stream 的,所以在这一层做掉。ExecutionGraph 的责任是方便调度和各个 tasks 状态的监控和跟踪,所以 ExecutionGraph 是并行化的 JobGraph。而“物理执行图”就是最终分布式在各个机器上运行着的tasks了。所以可以看到,这种解耦方式极大地方便了我们在各个层所做的工作,各个层之间是相互隔离的。